日東工器様パイプ用オートカプラの接続・分離システム事例にYCAM3D利用
日東工器様が協働ロボットによるパイプ用オートカプラの接続・分離システムの事例としてYCAM3Dを使用されている動画を掲載されています。
日東工器様が協働ロボットによるパイプ用オートカプラの接続・分離システムの事例としてYCAM3Dを使用されている動画を掲載されています。
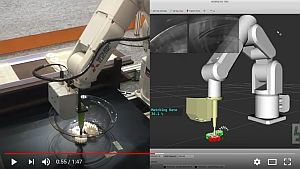
ビジュアルティーチは、ロボットに視覚機能を持たせることにより、ロボットの経路教示データをワーク基準で動かすことを可能にした技術です。
その動作をイメージしやすいように、説明動画にしてみました。
YOODSのビジュアルティーチングを使った「バリ取り」デモンストレーションです。ロボットを使ったバリ取り動作を、ワークの位置決め無し、または位置決めにバラツキがあっても、ロボットに搭載した3Dビジョンセンサー「YCAM3D」で撮影して3次元的に補正します。
YOODSの開発したVT-ビジュアルティーチは、ロボットアームに3Dビジョンセンサー(3Dカメラ)を搭載し、対象ワークの位置姿勢を認識してティーチングパスを補正する技術です。これにより、ロボットは位置決め装置無しで動くことができるようになります。
3DビジョンセンサーYCAM3Dのロボットキャリブレーション
3Dビジョンセンサー「YCAM3D」をロボットアームに搭載した際に、ロボットのどこに、どのような姿勢でYCAM3Dが設置されているか、を正確に求める必要があります。
実際には、この動画のようにロボットの周囲に置いたキャリブレーション板をロボットアーム上のYCAM3Dから撮影することで、自動的にその位置姿勢を求めることができます。
YOODSの開発した3Dビジョンセンサーは、ロボットアームに搭載できる高精度3Dカメラです。
- 位相シフト方式の高精度点群出力
- ロボットアーム搭載前提の耐振動・耐衝撃設定
- VT(ビジュアルティーチ)により、ロボット教示点の一括補正機能を提供
- ROSドライバの提供により、カメラの全データにアクセス可能
- Windows10ドライバも提供
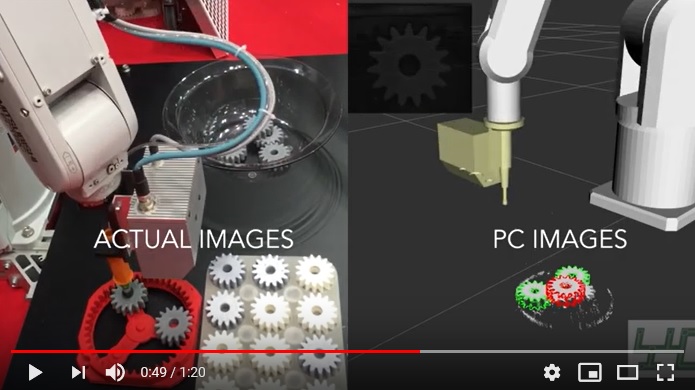
Automotive World 2019の際のデモ動画です。
バラ積みピッキング時にワーク姿勢まで評価してピッキング角度を揃えているので、プレース時に歯車をかみ合わせることができる、という内容になっています。
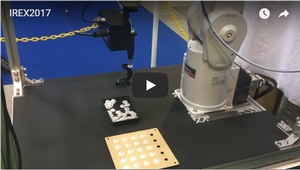
WRS2018のNEDOブースに出展致しました。
YCAM3D-Ⅲをロボットの先端に取り付け、ロボットの目として使用します。撮影した点群データを部品のCADとマッチングして部品を認識し、ロボットでピッキングします。
※YCAM3D-Ⅲは、小型ロボットへも搭載可能なコンパクト・軽量設計です。
YOODSの三次元計測カメラ「YCAM3D」をロボットに搭載してワークに近づいて高精度3次元計測を行います。
HALCONのSurfaceMatching機能により、歯車を認識しています。
ワークの裏表を判定して、裏の場合は反転治具を通して整列しています。
YOODSの三次元計測カメラ「YCAM3D」をロボットに搭載してワークに近づいて高精度3次元計測を行います。
HALCONのSurfaceMatching機能により、歯車を認識しています。
ワークの裏表を判定して、裏の場合は反転治具を通して整列しています。

YOODSの三次元計測カメラ「YCAM3D」をロボットに搭載してワークに近づいて高精度3次元計測を行います
ワークのM3CAPをロボットピッキングしているデモンストレーションです
実際にはワークの姿勢に応じたアプローチも可能ですが、このデモンストレーションでは垂直方向からアプローチしています。

YOODSの三次元計測カメラ「YCAM3D」をロボットに搭載してワークの周りから撮影を行っています。
HALCONのSurfaceMatching機能により、歯車を認識しています。
キャリブレーションしたロボット位置情報と撮影データから複数の点群データの座標系を統一して合成したデモンストレーション動画です。
ここで使用しているロボットキャリブレーション技術はピッキングの際のロボット位置補正にも使用できます。
※ YCAM3Dはハンドアイとしてロボットに搭載、または分離して固定カメラとして配置します。

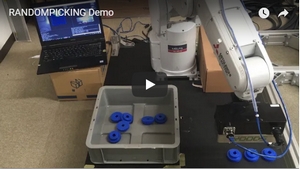
YCAM3Dをロボットの目として使用します。CADからつくった点群データや計測した点群データをマスター データとして用い、ピッキング対象を撮影した点群データから個別の部品を認識して、ロボットでピッキングします。
YCAM3D、ピッキングロボット、ロボットハンド
※ YCAM3Dはハンドアイとしてロボットに搭載、または分離して固定カメラとして配置します。
Copyright © 株式会社YOODS All Rights Reserved.