『高精度・高速3Dビジョンでロボットを変える』
産業用ロボットは教示どおりの動作を正確に繰り返すことで、様々な作業の自動化を実現してきました。しかしワークの設置ズレや掴んだ際のズレが発生するとロボットは動きを補正できないため、治具や供給装置による位置決めが欠かせませんでした。
YOODSの3Dロボットビジョンシステムは、このズレを瞬時に正確に測定して教示動作を補正することにより、機械的な位置決めを不要にします。
YOODSはこの3Dの目でロボットの適用範囲を広げ、明日のモノづくりに貢献します。
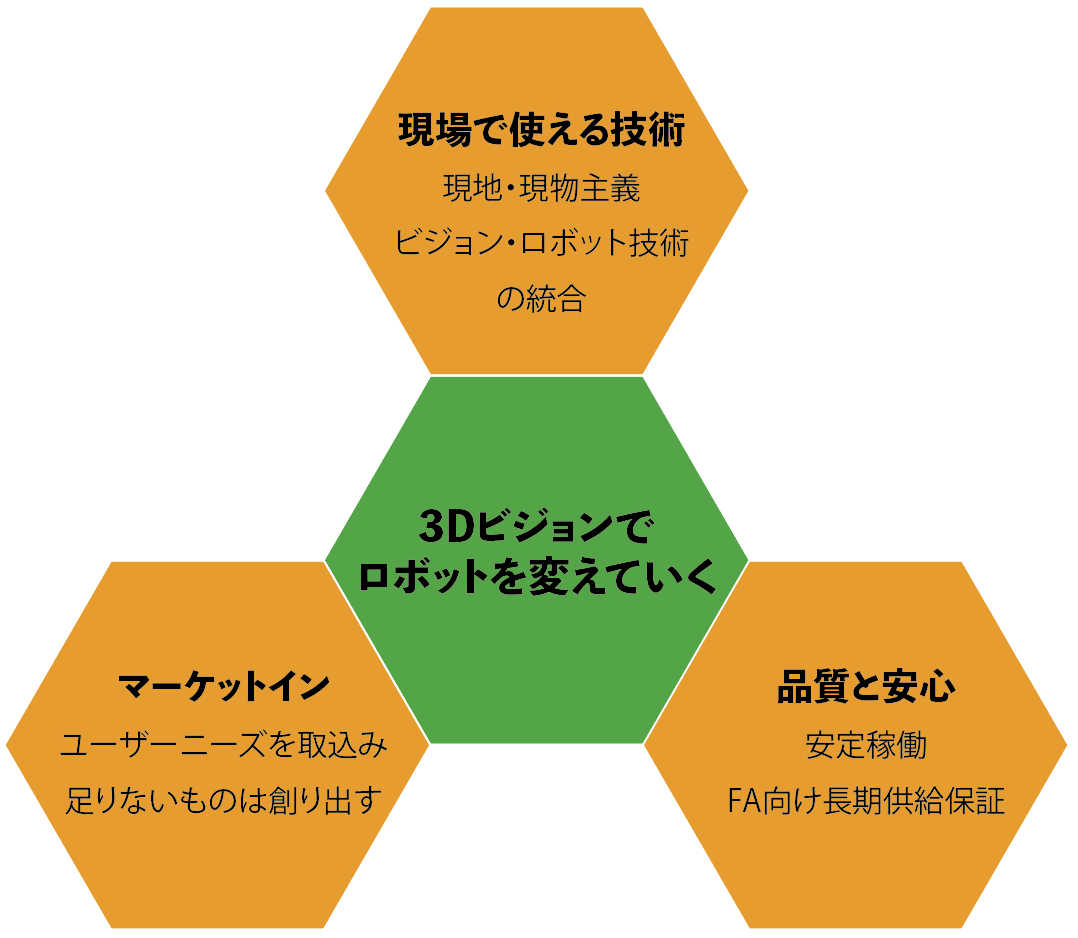
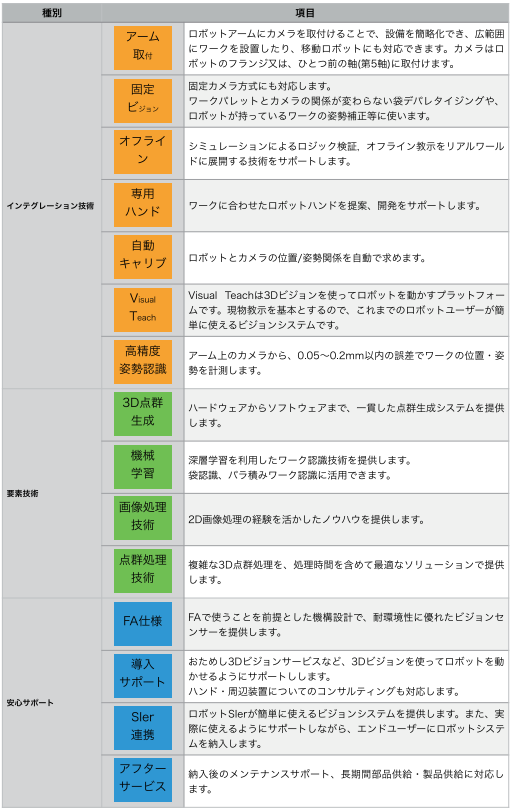
YOODSの提供する技術
ターゲットとするアプリケーション
ピッキング
ロボットビジョンと言えばランダム(ロボット)ピッキングとのイメージがあるようですが、ピッキングにはロボット・ビジョン以外に、ハンドの開発という課題があります。その次には、ワーク設置環境とロボットやハンドの干渉回避という二つのハードルがあるため、弊社では「準整列状態」での採用をお勧めしています。まずはこの範囲からのロボットを導入しましょう。
ピッキング例
3DビジョンセンサーYCAM3Dは、マツダ(株)のSKYACTIVエンジンの生産ラインにおいて、井桁積みされたクランクシャフトを移載するロボットに搭載されています。VT(ビジュアルティーチ)によりロボットの把持位置/姿勢を高精度に求めることで、ロボットとワークの衝突や把持失敗が発生しないクランクシャフトの移載を実現しました。
バリ取り・溶接
VT(ビジュアルティーチ)は教示したティーチングポイント・動作パスをワークに合わせて一括変換することができます。一般に「バリ取り・溶接」では複雑な教示情報を持つことが多いので、VTを導入することによりワークの設置位置姿勢を気にせずプロセスの自動化を実現できます。
高精度組立・治具レス組立
ロボットによる組立プロセスの自動化もVTの範疇です。ワークの姿勢を正確に認識することにより、治具を使わずに位置決めの高精度化することも可能で、工夫次第で公差の厳しい組立工程の自動化も実現できます。



Copyright © 株式会社YOODS All Rights Reserved.